![]()
Tri rotor
![]() Monocopter
Monocopter
![]() Photos
Photos
![]() Videos
Videos
![]() Source code
Source code
![]() News
News
![]() Harass
Harass
![]()
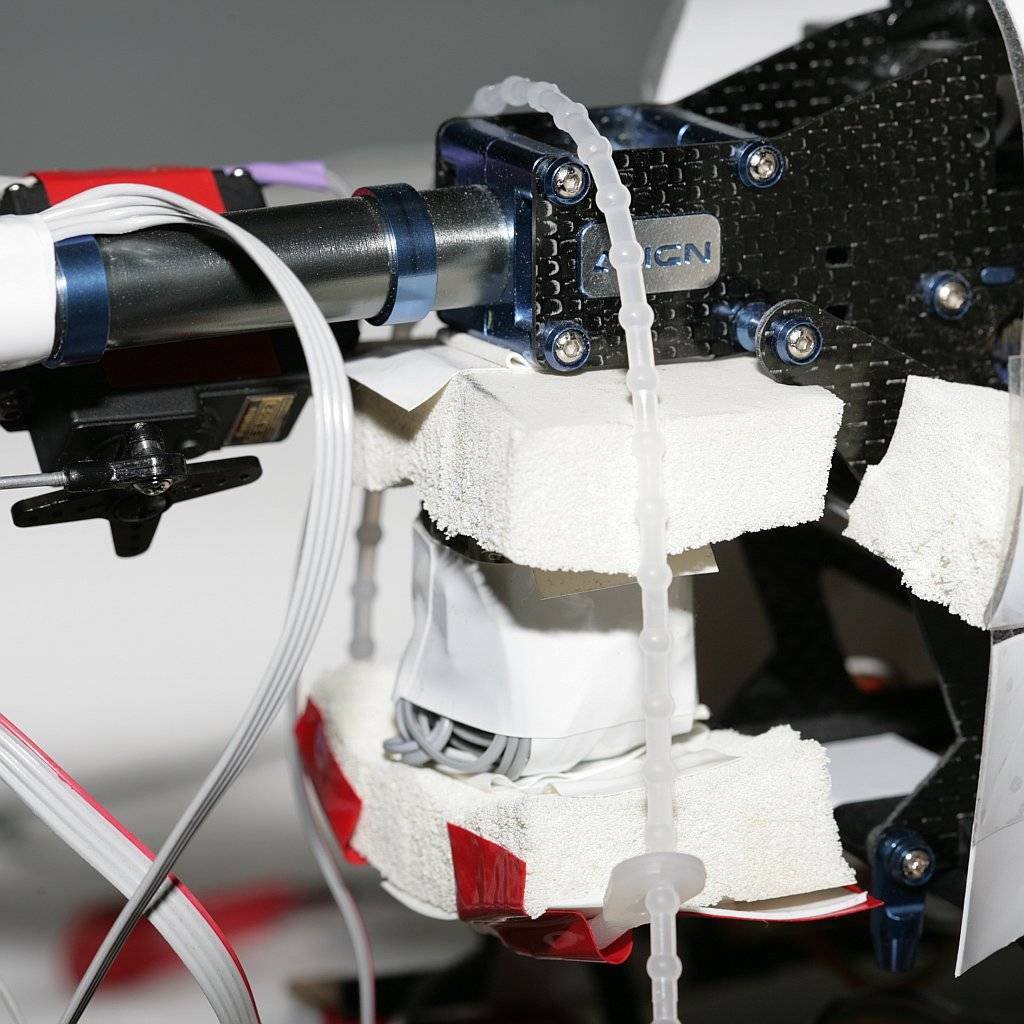
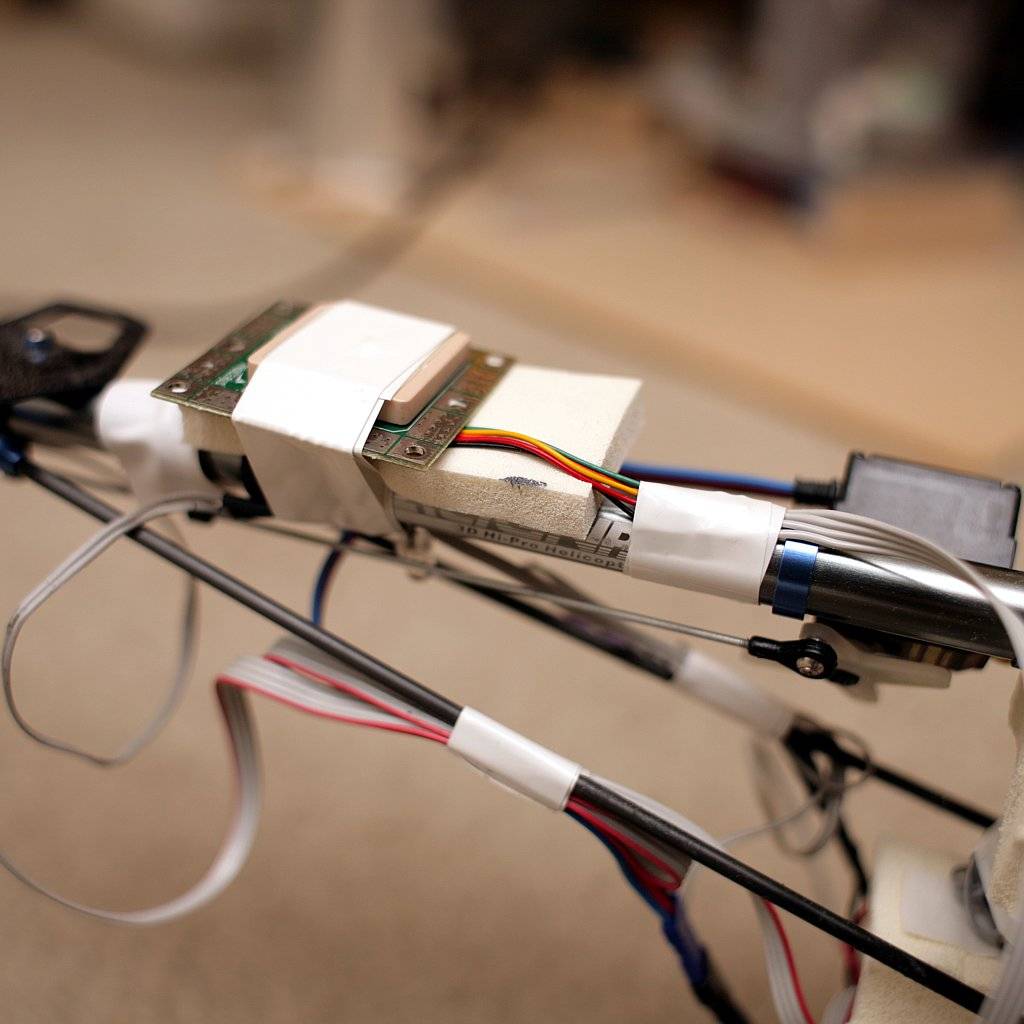
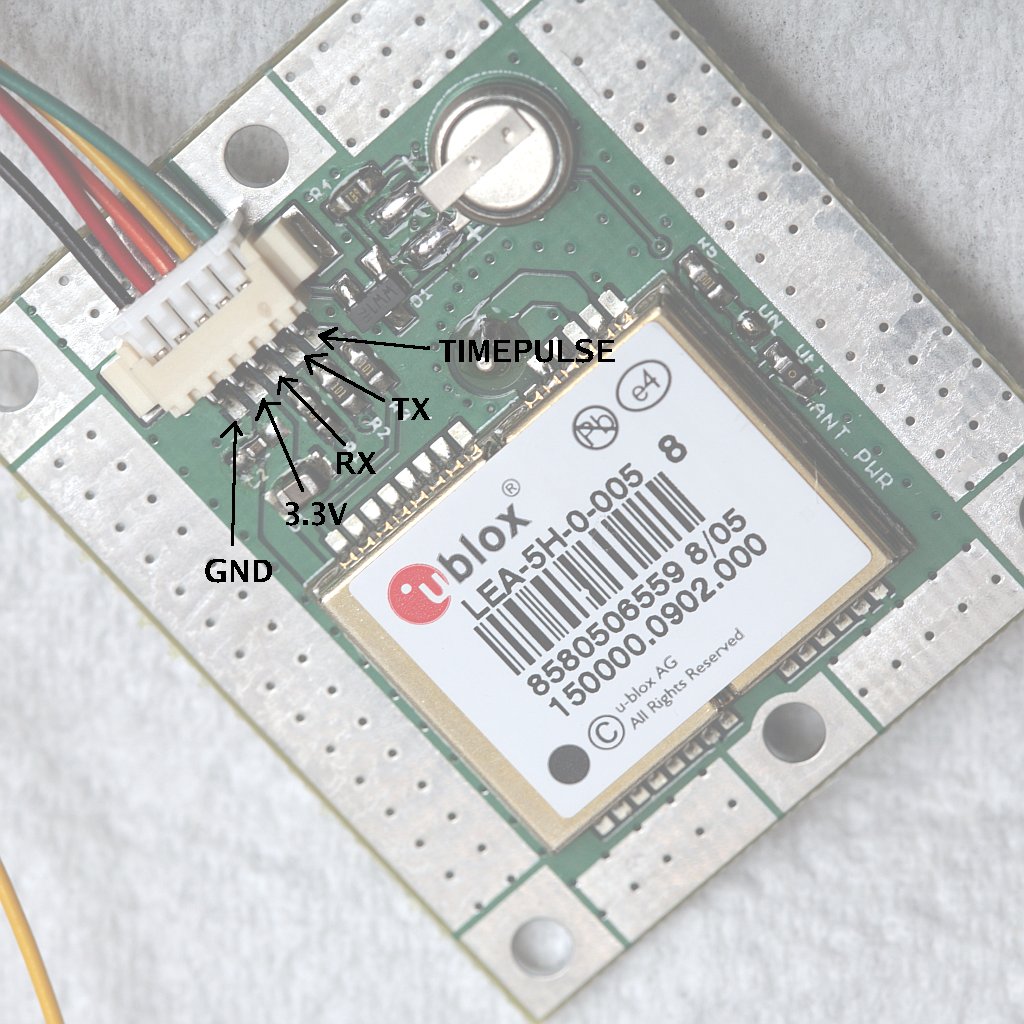
T-REX PHOTOS






































(C) 2012 Flat broke, unemployed programmers
![]()
Tri rotor
![]() Monocopter
Monocopter
![]() Photos
Photos
![]() Videos
Videos
![]() Source code
Source code
![]() News
News
![]() Harass
Harass
![]()
(C) 2012 Flat broke, unemployed programmers